Keyestudio
Kit Auto Balanceador Keyestudio
Kit Auto Balanceador Keyestudio
9 en existencias
SKU:2707
No se pudo cargar la disponibilidad de retiro
Descripción del Producto
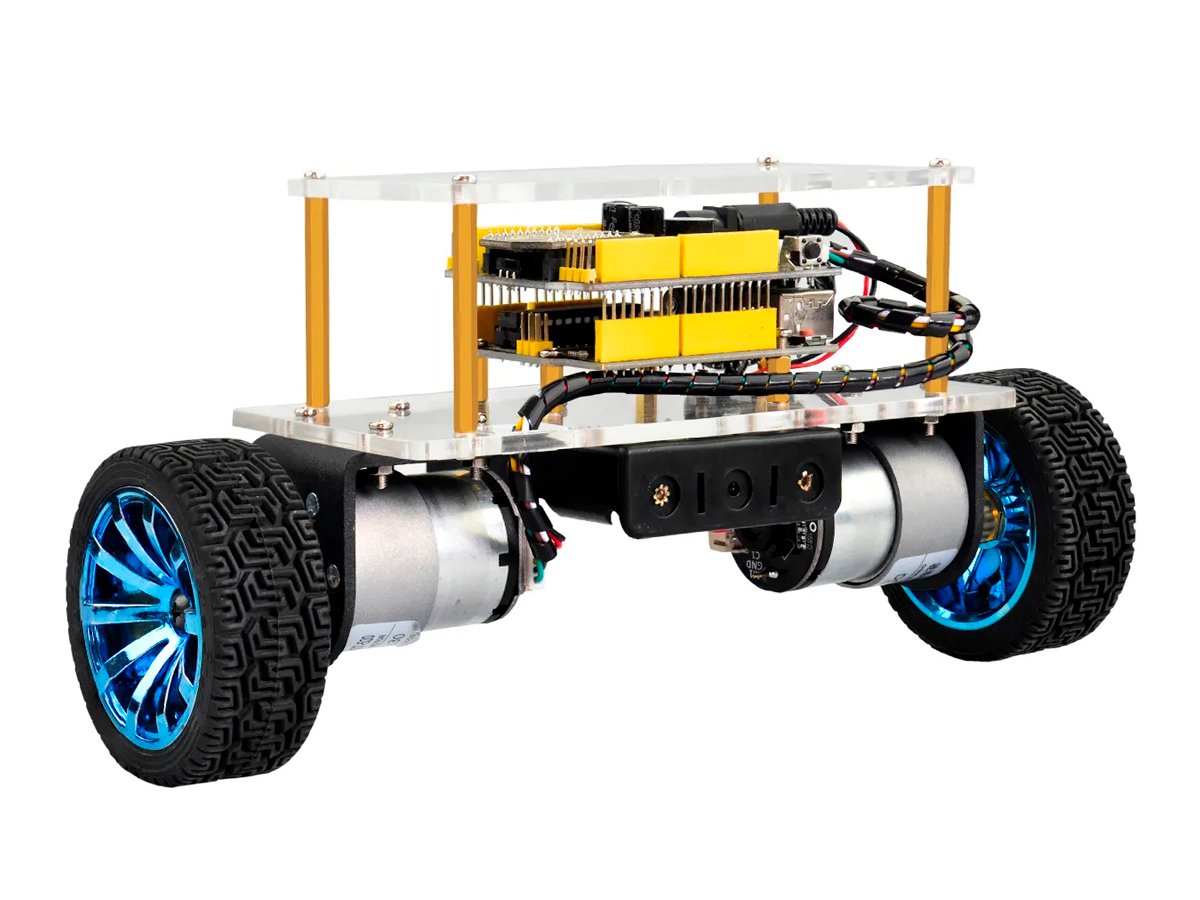
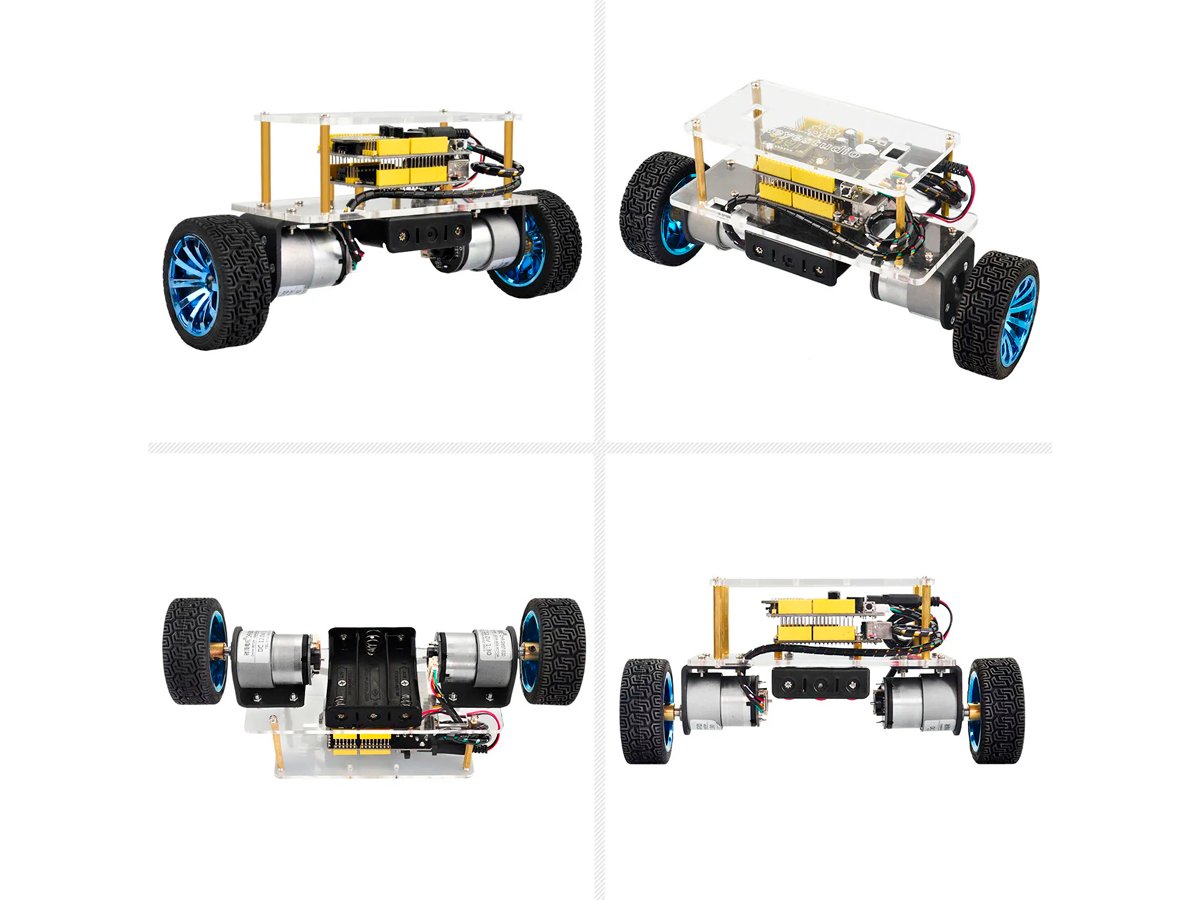
Este coche autoequilibrante Keyestudio KS0193 está diseñado sobre la plataforma Arduino e integra una potente combinación de sensores, controladores y motores para lograr un equilibrio dinámico estable. El sistema utiliza la placa Keyestudio REV4 como unidad principal y un Balance Shield V3 que incorpora un MPU6050 para medir ángulo y velocidad angular del vehículo. Gracias a su diseño modular, el kit incluye todo lo necesario para ensamblar, calibrar y programar el coche sin conocimientos previos.
El shield también integra una interfaz para el módulo Bluetooth XBee HC-06 (compatible únicamente con Android), lo que permite controlar el coche desde una aplicación móvil. La APP ofrece control por botones, control por gravedad, ajuste del ángulo de equilibrio y modificación de parámetros PID. El autoequilibrado se basa en mantener la postura vertical mediante el movimiento controlado de las ruedas, accionadas por motores DC con encoder Hall de alta precisión.
El control del coche se compone de tres tareas principales:
- Control de Equilibrio: Mantener el coche en posición vertical corrigiendo la inclinación mediante el giro de las ruedas.
- Control de Velocidad: Gestionar movimiento hacia adelante y atrás controlando la inclinación del cuerpo del coche.
- Control de Dirección: Ajustar diferencias de velocidad entre motores para girar suavemente.
Estas tres funciones trabajan de manera acoplada, por lo que el ajuste fino del equilibrio (PID) es fundamental para lograr un funcionamiento estable. El kit incluye documentación completa para montaje, pruebas iniciales, calibración del MPU6050, programación y uso de la APP Bluetooth.
Incluye
- 1 × Placa principal Keyestudio REV4
- 1 × Shield de Equilibrio Keyestudio V3 (negro, ecológico)
- 1 × Bluetooth XBee HC-06 Keyestudio
- 2 × Motores DC GM37-520 con codificador Hall (12V, relación 1:30) + soportes tipo L
- 1 × Cable USB AM/BM azul transparente (50 cm)
- 1 × Caja de batería para 3×18650 (baterías no incluidas)
- 2 × Cables PH2.0 de doble cabeza, 6 pines (30 cm)
- 1 × Juego de placas acrílicas (2 piezas)
- 2 × Ruedas 68×26 mm (colores negro y azul)
- 2 × Acopladores hexagonales de cobre (6 mm diámetro × 18 mm largo)
- 1 × Destornillador Philips 3×40 mm
- 1 × Llave hexagonal interior M2
- 2 × Soportes de hierro para motor
- 1 × Tubo enrollador negro
- 4 × Pilares de cobre M3×45 mm
- 4 × Pilares de cobre M3×10 mm
- 12 × Tuercas M3 niqueladas
- 2 × Tornillos negros M4×6
- 6 × Tornillos M3×6 mm
- 10 × Tornillos M3×8 mm
- 4 × Tornillos M3×8 mm (cabeza plana)
- 2 × Tornillos M3×12 mm (cabeza plana)
- 10 × Tornillos M3×12 mm
Documentación oficial y tutoriales